
磁场测速是一种利用磁场梯度的相对位姿估计方法,突破了传统磁场匹配方法依赖先验磁图的限制,能够有效改善现阶段消防员、特种作战等专业人员场景缺少可靠、长续航定位方案的困境。本文提出一种“磁-惯”里程计方法(MIO)。该方法采用随机克隆扩展卡尔曼滤波(SC-EKF),利用磁力计阵列观测反演的局部空间磁场模型构建连续导航状态之间的空间关联,从而有效抑制惯导的位置漂移误差。同时,宏观尺度下地磁矢量不变的约束,被用于解决磁场测速模型中航向不可观测的问题,进一步降低位置漂移误差。在办公楼、地下停车场等典型室内环境中,该方法速度估计精度可达 0.07m/s,水平位置误差漂移率优于1.5%。
受铁磁性物质干扰的影响,室内磁场兼具长期稳定性与空间区分度,这使其成为一种可靠的定位信息源。区别于磁场特征匹配的绝对定位方法,磁里程计不依赖于预先构建的磁场地图,而是利用多个三轴磁力计构成的阵列在载体运动过程中感知空间中的磁场变化,并结合空间磁场建模的先验知识来建立磁阵列各磁力计输出与载体运动速度之间的关系。在具有显著磁场特征的室内区域,或光学传感器与测距传感器暂时失效的室内场景中,磁场里程计可用于提升多传感器导航系统的整体鲁棒性。
本文提出的磁场里程计基于空间磁场在无自由电荷的条件下旋度和散度为零的物理假设,对局部空间磁场进行多项式建模。基于此种建模方式,在数据融合阶段,首先通过捷联惯性导航解算以确定载体当前的位置、速度和姿态,并利用磁力计的测量数据估计局部磁场多项式模型的参数。随后,借助历史状态信息计算连续历元间的相对位姿变化,并对相应的磁场模型进行预测。接着将这些预测结果与相邻历元的磁力计阵列测量数据相结合,构建更新约束条件。最后,采用随机克隆扩展卡尔曼滤波(SC-EKF),将磁场模型的变化量与惯导积分得到的递推状态进行融合,实现“磁-惯”里程计。此外,为应对绝对航向不可观而造成的航向发散问题,算法中融入了导航坐标系中的地磁矢量约束。

图1 SC-EKF-MIO 算法流程图
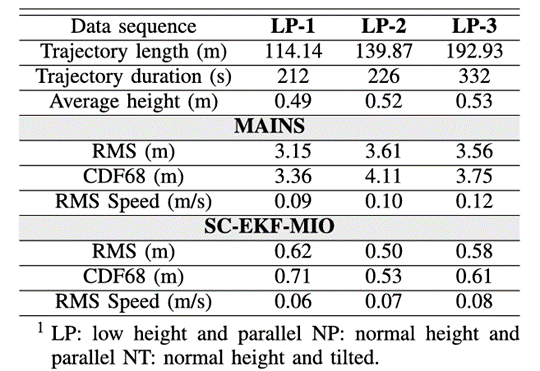
团队在办公楼、地下车库等典型室内场景以及公开数据集上对SC-EKF-MIO算法进行了详尽的实验验证。图2为实验测试使用的设备平台。图3和图4分别展示了所提算法在自测数据集的三个场景和公开数据集上的平面轨迹估计结果。表1和表2分别给出了自测数据集和公开数据集上的轨迹估计误差和速度误差。在两个数据集上,本文方法的平面轨迹RMSE均值分别为2.65m和0.56m,速度误差均值分别为0.13m/s和0.07m/s。
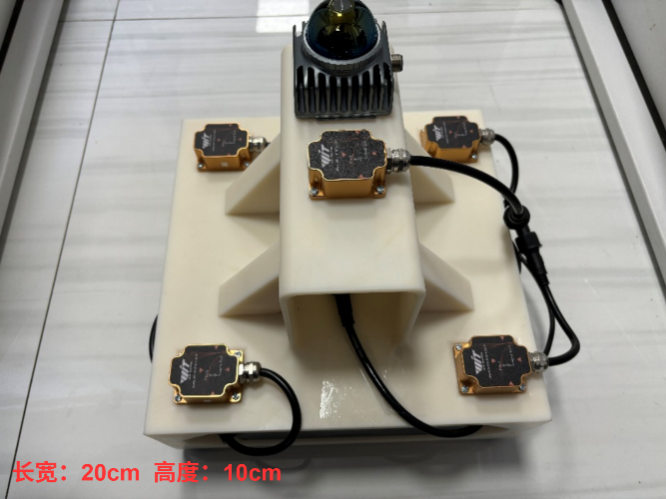
图2 实验测试平台

图3 自测数据集轨迹估计结果

图4 公开数据集轨迹估计结果
表1 自测数据集轨迹估计误差和速度误差
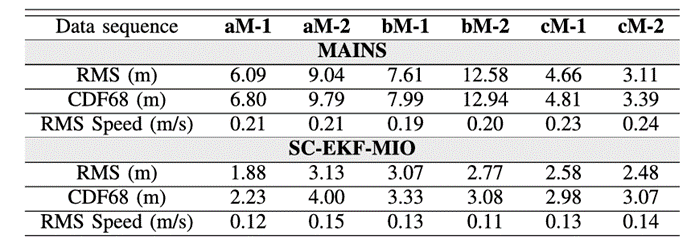
表2 公开数据集轨迹误差和速度误差
综上,团队通过SC-EKF滤波框架融合磁力计阵列感知的局部磁场模型差异和宏观地磁矢量约束,实现了不依赖任何载体运动假设,也无需预先建立的磁场指纹数据库的自主相对位姿估计,显著抑制了室内场景下的位置漂移。本文方法为无预先布设且无先验地图库条件下的室内“自由”载体定位导航(尤其是行人、无人机或车辆)提供了一种低成本、低功耗、小体积且稳健可靠的航位推算解决方案。未来团队将进一步探索这种磁里程计与其它室内绝对定位信号的融合方案。
研究成果已被期刊IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT录用。
参考文献
[1] Jiazhu Li, Jian Kuang, Yan Wang, Xiaoji Niu, "SC-EKF-MIO: Magnetic-Inertial Odometry Based on Stochastic Clone Extended Kalman Filter," in IEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1-13, 2025, Art no. 9546613, doi: 10.1109/TIM.2025.3644556.
版权所有:武汉大学多源智能导航实验室(微信公众号:i2Nav) 当前访问量: 技术支持:武汉楚玖科技有限公司